Trajectory-based operations (TBO) are accomplished through 4D trajectories. A 4D trajectory is computed by automation (ground and/or flight deck) and defines the flight path of an aircraft from one point to another in four dimensions latitude, longitude, altitude, and time.
Trajectory-based operations have three key components:
- Agile, optimized, aircraft-specific routing
- Collaborative electronic negotiation of user-defined trajectories based on Air Traffic Control (ATC) constraints
- Flow management in a mixed-equipage environment that smoothly and effectively combines flight-deck-based and ground-based metering, merging, and spacing
The challenges of implementing TBO include:
- Common understanding of trajectories
- Robust, timely, and secure communications
- Balance among predictability, stability, and flexibility
- Robustness, graceful degradation, and efficient recovery
- Trajectory negotiation and collaborative decision making
- Accommodation of mixed equipage and mixed performance
- Changes to roles and responsibilities
- Consistent use of TBO tools by all users
NASA has been developing trajectory-based systems to improve the efficiency of the National Airspace System during specific phases of flight and is now also exploring Advanced 4-Dimensional Trajectory (4DT) operational concepts that will integrate these technologies and incorporate new technology where needed to create both automation and procedures to support gate-to-gate TBO. A TBO Prototype simulation toolkit has been developed that demonstrates initial functionality that may reside in an Advanced 4DT TBO concept. In September 2016, controller and pilot subject matter experts (SMEs) were brought to the Air Traffic Operations Laboratory at NASA Langley Research Center for discussions on an Advanced 4DT operational concept and were provided an interactive demonstration of the TBO Prototype using four example en route scenarios. The SMEs provided feedback on potential operational, technological, and procedural opportunities and concerns. After viewing the interactive demonstration scenarios, the SMEs indicated that the operational capabilities demonstrated would be useful for performing TBO while maintaining situation awareness and low mental workload. The TBO concept demonstrated produced defined routings around weather which resulted in a more organized, consistent flow of traffic where it was clear to both the controller and pilot what route the aircraft was to follow. In general, the controller SMEs reported that traffic flow management should be responsible for generating and negotiating the operational constraints demonstrated, in cooperation with the Air Traffic Control System Command Center, while air traffic control should be responsible for the implementation of those constraints. The SMEs also indicated that digital data communications would be very beneficial for TBO operations and would result in less workload due to reduced communications, would eliminate issues due to language barriers and frequency problems, and would make receiving, loading, accepting, and executing clearances easier, less ambiguous, and more expeditious. The feedback obtained during this activity will be used in future research and development of Advanced TBO concepts.
TBO-TIGAR

High-Fidelity Aircraft Simulation (top) Communicating with TBO-TIGAR (bottom) in a Laboratory Environment
TBO-TIGAR is a capability developed to prototype, demonstrate, and assess the impact of proposed functionality for TBO. NASA is developing concepts and technologies that fundamentally change how air traffic is managed in a future TBO airspace system. TBO-TIGAR allows researchers to quickly prototype certain elements of these concepts and technologies in a low-fidelity environment, demonstrate them to various air traffic management and operations stakeholders, and obtain first-order measurements of their benefits or impacts to the overall air traffic system. These rapid prototyping activities are fundamental to the early refinement of these concepts and technologies. Functionality that is prototyped within TBO-TIGAR and exhibits potential benefits to the air traffic system can then be further analyzed in higher fidelity simulations or operational system, where the time and resources required to implement such functionality is much greater than with TBO-TIGAR.
The capabilities of TBO-TIGAR include:
- Simulated air traffic
- Connectivity to other simulation components
- Simulated aircraft-ground data link communications
- Trajectory generation and trajectory description libraries
- Algorithms:
- Prediction of aircraft versus aircraft and aircraft versus weather hazard conflicts
- Dynamic re-route solutions around weather
- Time-based metering and scheduling of aircraft
- Required time-of-arrival (RTA) for simulated aircraft
- Pair-wise spacing interval management for simulated aircraft
High-Level Goals
- Reduce environmental impacts caused by fuel consumption, emissions, and noise levels
- Increase the capacity of the National Airspace System (NAS) to support growth in air traffic demand
- Maintain current level of safety
- Create a common operational picture among TBO participants
- Support agile, flexible routing
- Incorporate all vehicles into management by trajectory
The Rapid Research Design and Development (R2D2) platform allows researchers to test and demonstrate TBO concepts, tools, and enabling technologies in-situ using emulations and simulations of avionics and communication infrastructures, thus obviating the need for commercial off-the-shelf hardware and eschewing the costs of these systems. The R2D2 platform contains several components: research displays and interfaces, pilot displays and interfaces, DataComm Surrogate, and Spider tool.

- The emulated research displays and interfaces reside on a laptop computer that is connected to a hard-wired local area network onboard the research aircraft. They are similar to those of a current commercial aircraft cockpit, and include a Multi-Function Control Display Unit (MCDU), NASA Langley Research Prototype Flight Management System (RPFMS), simulated Avionics Data Bus (AvBus), Primary Flight Display (PFD), Navigation Display (ND), and Engine-Indicating and Crew-Alerting System (EICAS).
- The pilot display and interface reside on a tablet computer and is connected to the researcher laptop via a wireless local area network onboard the aircraft. It shows the flight crew relevant information to the operation being conducted as part of the flight test and allows them to communicate with the researcher in the cabin of the aircraft.
- The DataComm Surrogate allows messages to be sent at a user’s request to the RPFMS and responses to be received from the flight crew.
- The Spider tool is used to gather state data from a research data port on the aircraft and disseminate it to other components of the R2D2 platform
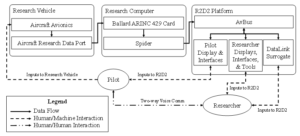
The R2D2 Platform is currently designed to be read-only from the aircraft, i.e., no data generated by the R2D2 platform is supplied directly to the research vehicle. For this set of operational trials, it is the responsibility of the human operator (the pilot at the researcher’s command) to follow guidance generated by the R2D2 platform and provide manual inputs into the aircraft’s flight systems such as the Mode Control Panel (MCP) or Flight Management System (FMS). Figure 3 (R2D2_SysArch.png) illustrates the system architecture for the R2D2 platform.
The R2D2 platform was successfully tested in October of 2016 and demonstrated the capability to test flight-deck based TBO concepts. Future work includes integrating this platform with the TBO-TIGAR suite, building new TBO tools into the platform, and accommodating and testing new communication technologies.
Tech POC: Bryan Barmore